Jumping Robot
Skills Demonstrated
- Team Work
- Robotics & Control
- Simulation Experiments
- Physical Hardware Experiments
- Parameter Sweep
- C++
- Matlab
- mbed Microcontroller
Project Description
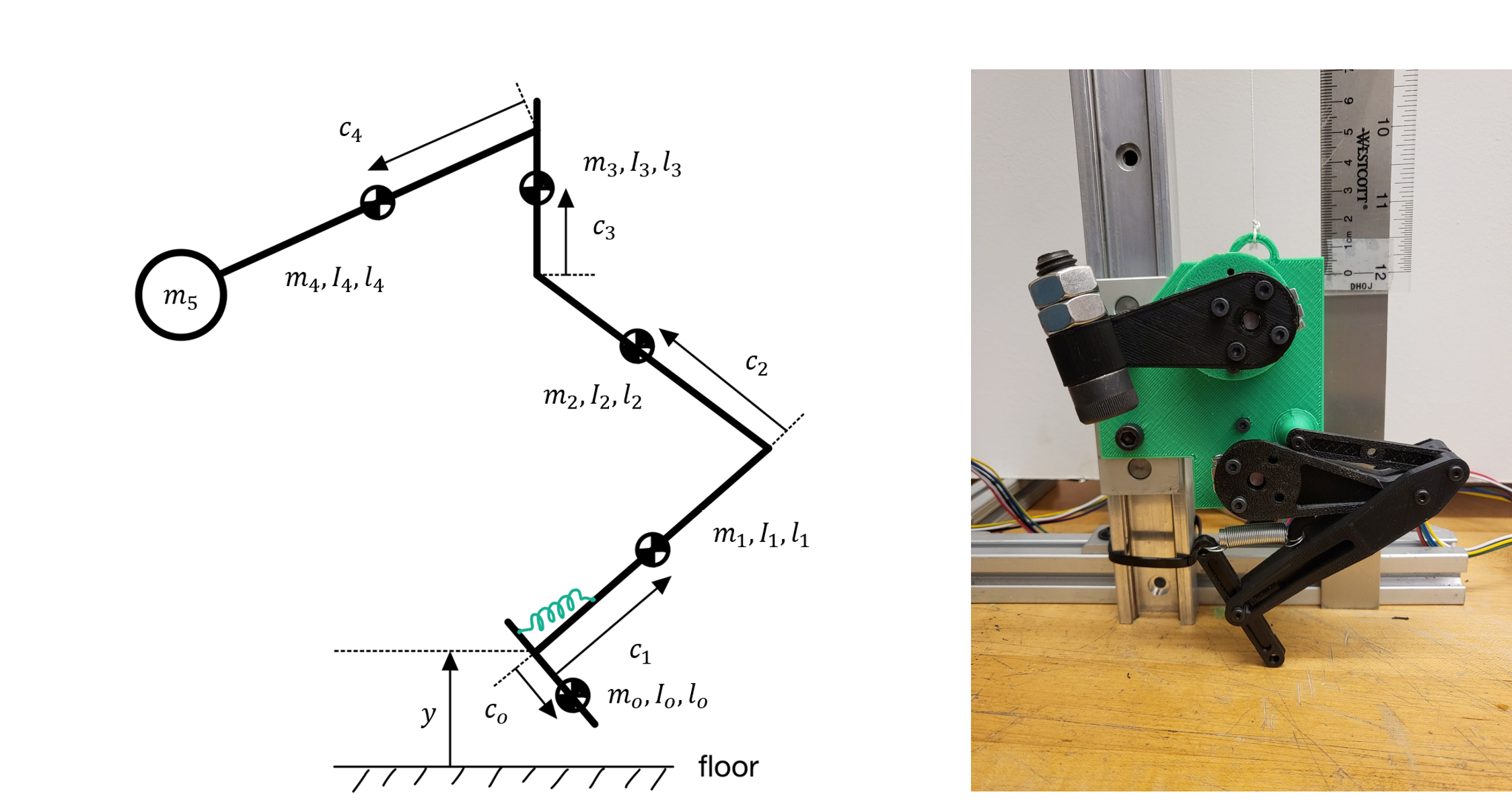
Inspired by the way humans perform vertical jumps, in this project we studied the effect of arm swing loading of an elastic ankle joint on the jump height of a jumping robot. Our hypotheses included:
- Arm swing, in the presence of an elastic ankle, can increase maximum jump height
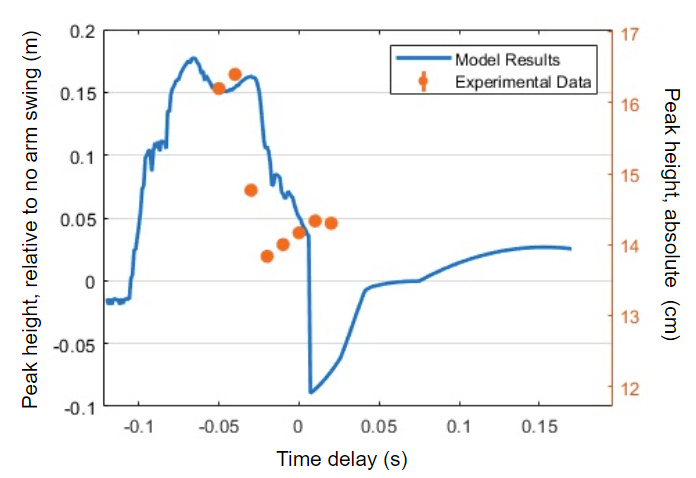
- The timing of the arm swing relative to the leg’s actuation time affects maximum jump height
- There exists an optimal arm swing timing that maximally exploits the elastic ankle for maximum jump height