publications & projects
Journal & Conference Publications
-
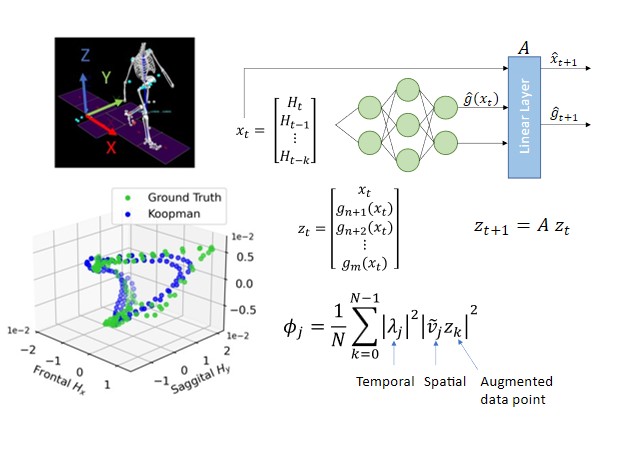 Koopman Modeling of Human Gait Dynamics for Global Modal Analysis Using Periodic Motion RegularizationIn Proceedings of the American Control Conference (ACC), 2025
Koopman Modeling of Human Gait Dynamics for Global Modal Analysis Using Periodic Motion RegularizationIn Proceedings of the American Control Conference (ACC), 2025 -
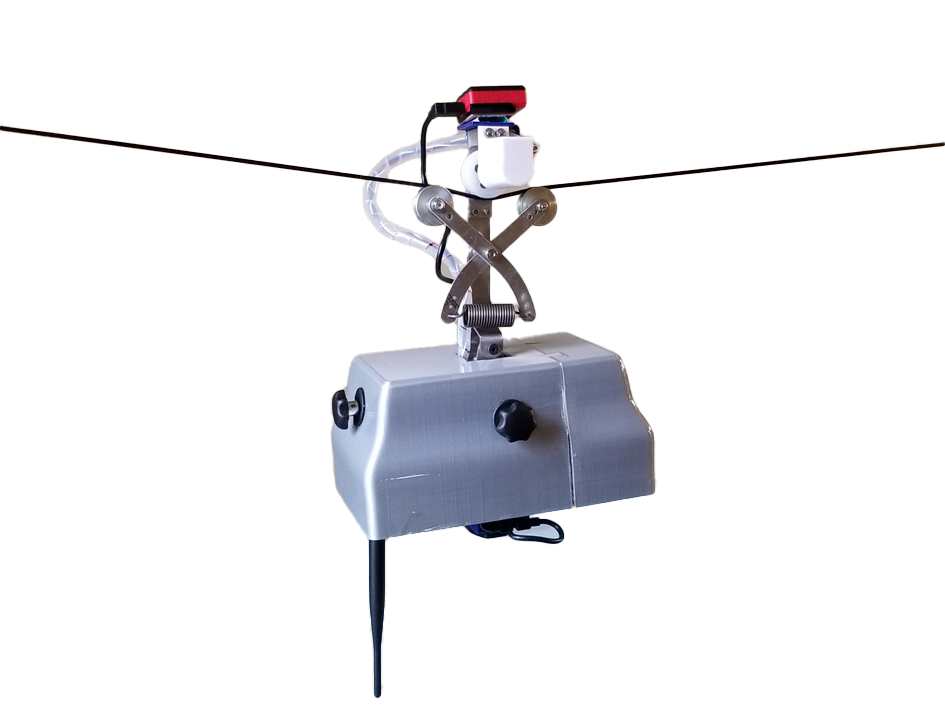
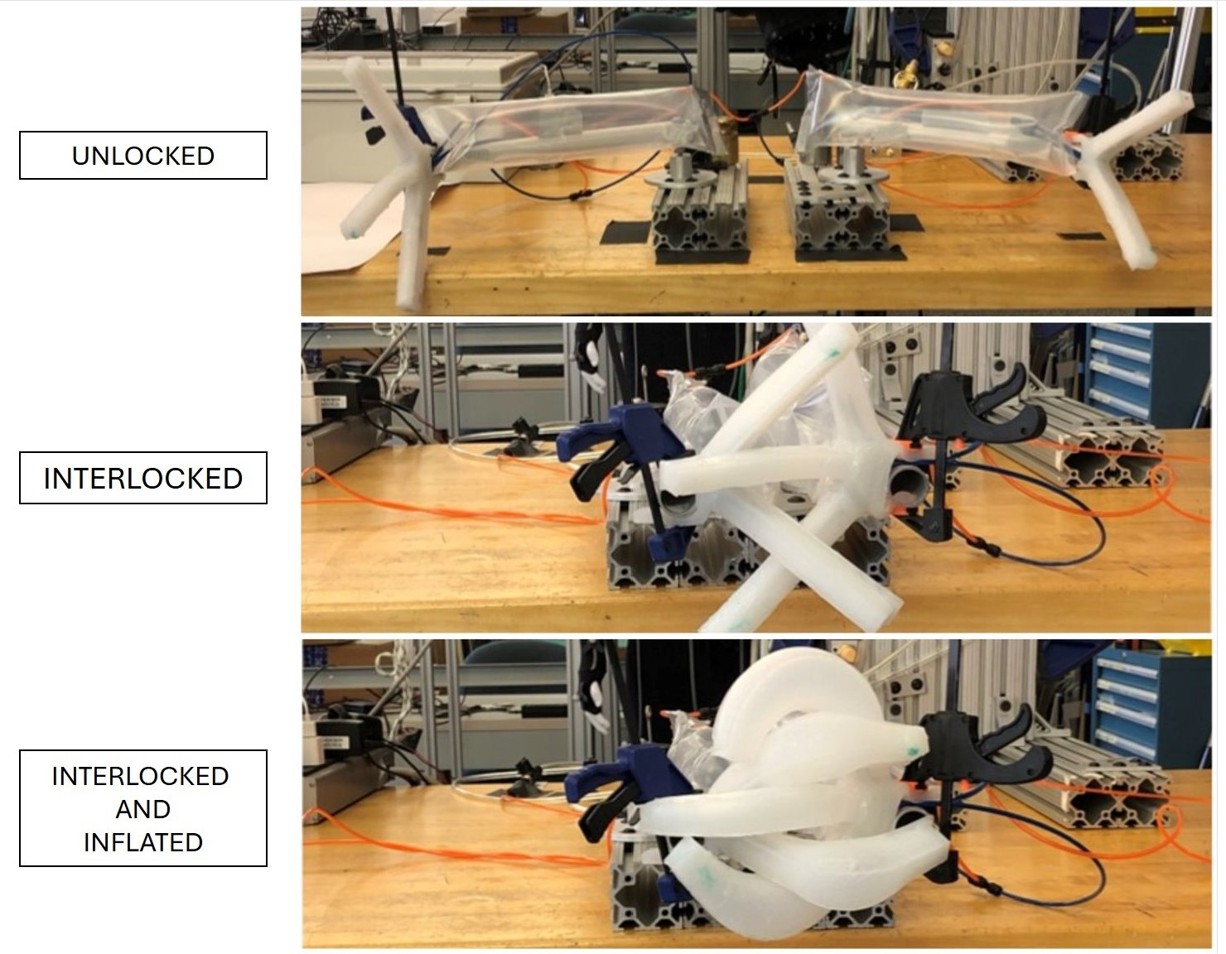 Design and Experimental Validation of Woodwork-Inspired Soft Pneumatic GrippersIn Proceedings of the 2025 IEEE International Conference on Robotics and Automation (ICRA)
Design and Experimental Validation of Woodwork-Inspired Soft Pneumatic GrippersIn Proceedings of the 2025 IEEE International Conference on Robotics and Automation (ICRA) -
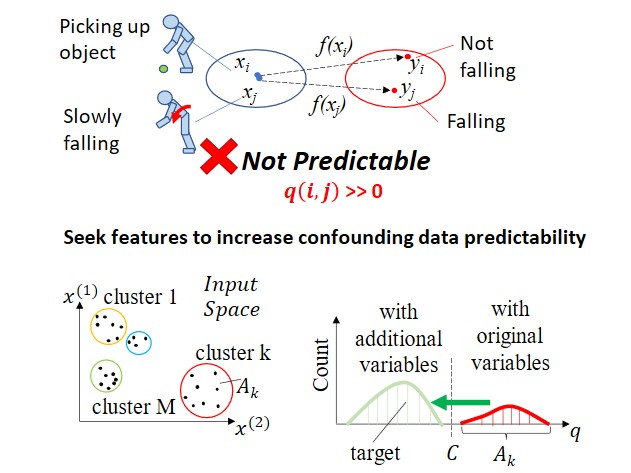 Model Free Method of Screening Training Data for Adversarial Datapoints Through Local Lipschitz Quotient AnalysisIEEE Robotics and Automation Letters, 2024
Model Free Method of Screening Training Data for Adversarial Datapoints Through Local Lipschitz Quotient AnalysisIEEE Robotics and Automation Letters, 2024 -
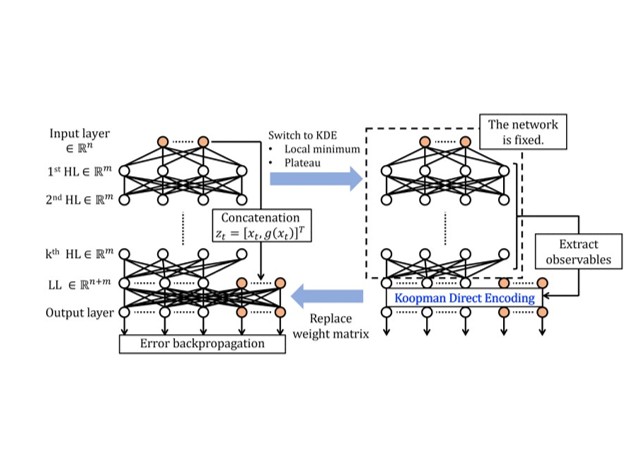 A Monte Carlo Approach to Koopman Direct Encoding and Its Application to the Learning of Neural-Network ObservablesIEEE Robotics and Automation Letters, 2024
A Monte Carlo Approach to Koopman Direct Encoding and Its Application to the Learning of Neural-Network ObservablesIEEE Robotics and Automation Letters, 2024 -
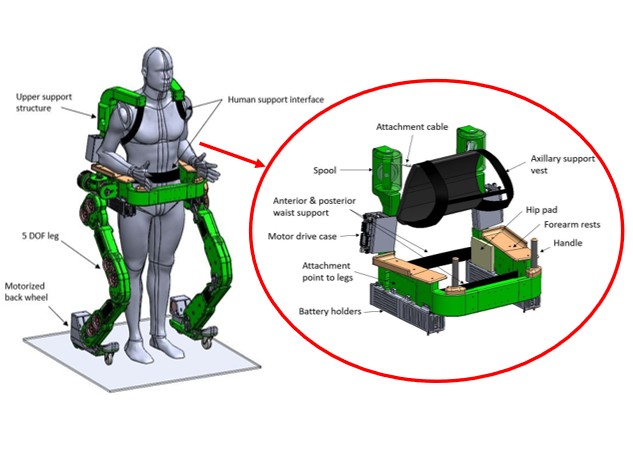
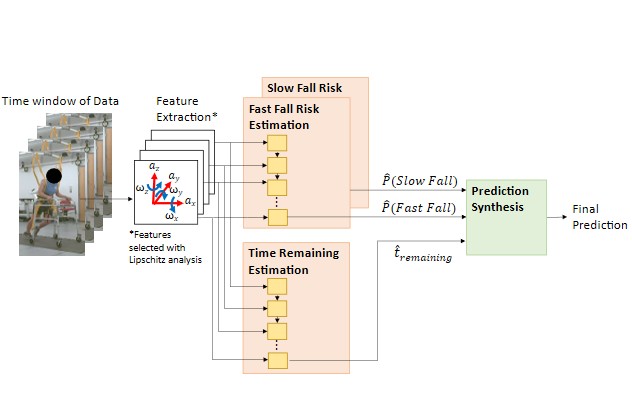 Time-Critical Fall Prediction Based on Lipschitz Data Analysis and Design of a Reconfigurable Walker for Preventing Fall InjuriesIEEE Access, 2023
Time-Critical Fall Prediction Based on Lipschitz Data Analysis and Design of a Reconfigurable Walker for Preventing Fall InjuriesIEEE Access, 2023 -
 Robust Autonomous Landing of a Quadcopter on a Mobile Vehicle Using Infrared BeaconsIn Proceedings of the VFS Autonomous VTOL Technical Meeting, jan 2023
Robust Autonomous Landing of a Quadcopter on a Mobile Vehicle Using Infrared BeaconsIn Proceedings of the VFS Autonomous VTOL Technical Meeting, jan 2023 -
 Gear Ratio Optimization of a Multifunctional Walker Robot Using Dual-Motor ActuationIn 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Gear Ratio Optimization of a Multifunctional Walker Robot Using Dual-Motor ActuationIn 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021







Class Projects
-
-
 Mixed Integer Footstep Planning & Trajectory Optimization of Active Compass Gait Walker2022Class project for 6.8210: Underactuated Robotics, MIT
Mixed Integer Footstep Planning & Trajectory Optimization of Active Compass Gait Walker2022Class project for 6.8210: Underactuated Robotics, MIT -



Patents
- Robotic systems and methods for assisting with user postureWIPO (PCT) WO2025122728A1, June 12, 2025
-
Other
-
-
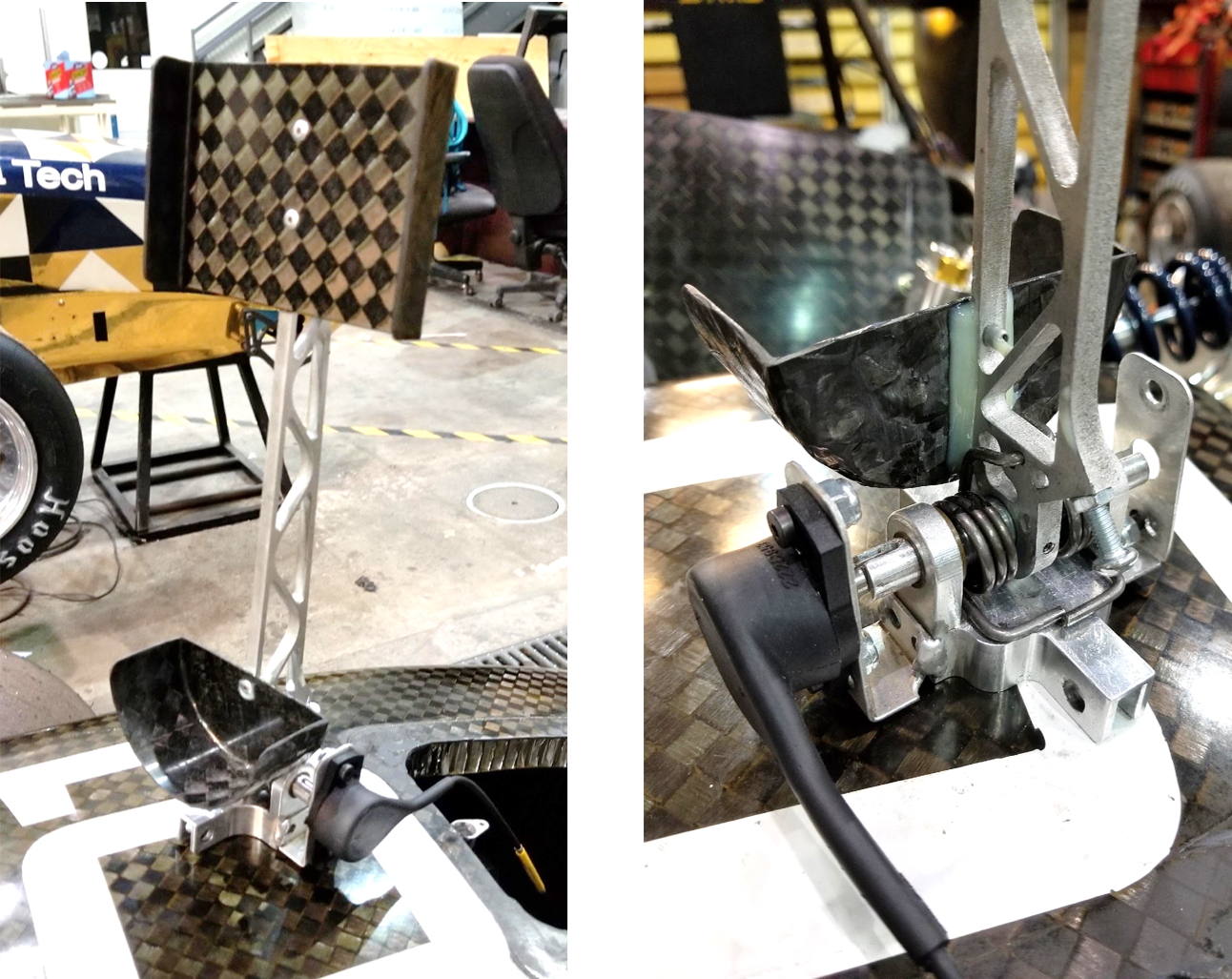 Pedalbox Design - Electronic Throttle Control2017GT Formula SAE (GTMS)
Pedalbox Design - Electronic Throttle Control2017GT Formula SAE (GTMS)

